BlueROV2
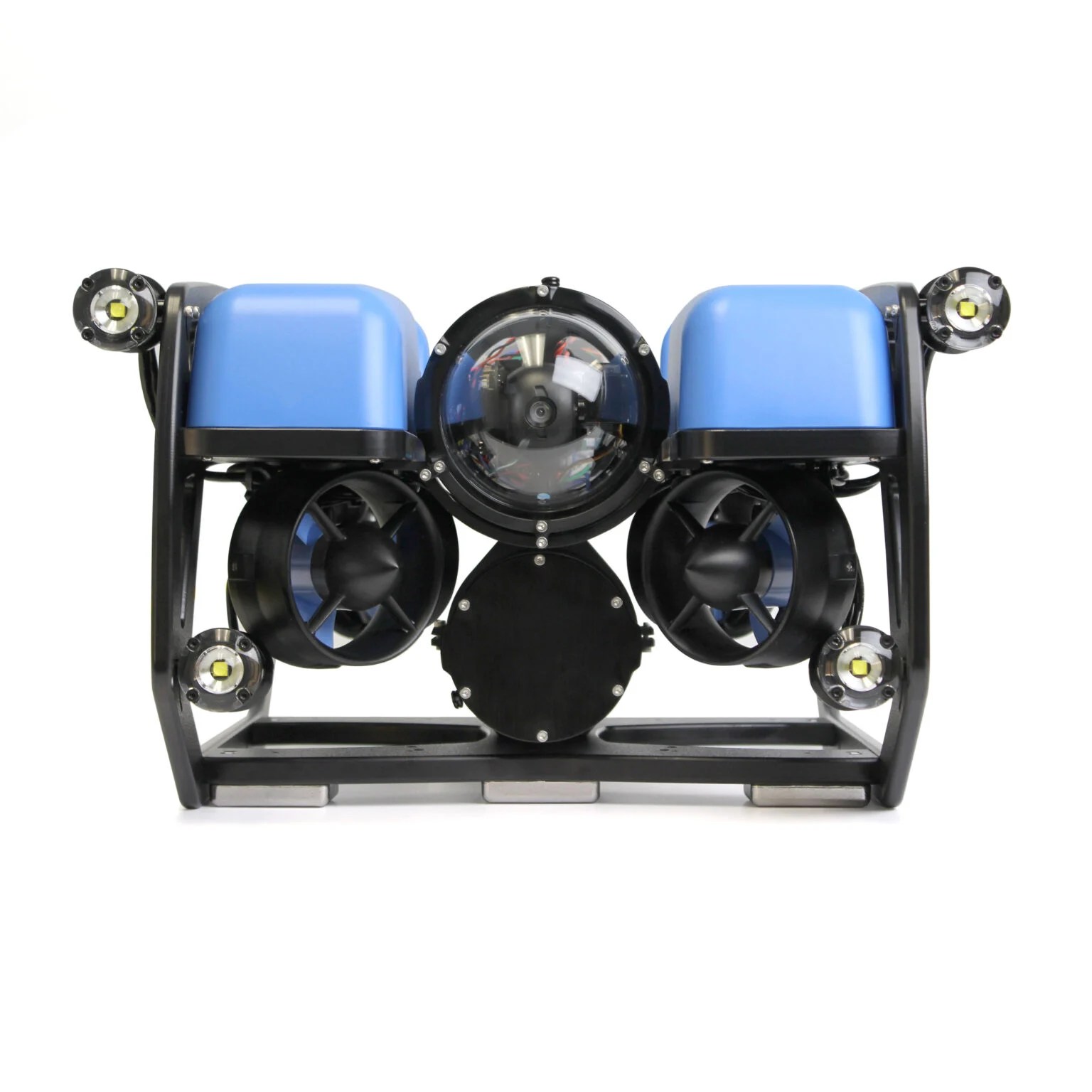
BlueROV2, denetim, araştırma ve keşif amaçlı tasarlanmış, yüksek performanslı ve son derece özelleştirilebilir bir sualtı ROV’dur. Altı itici motorlu vektörlü konfigürasyonu, açık kaynaklı yazılımı ve modüler genişletilebilirliği sayesinde, geleneksel sistemlerin yüksek maliyetine gerek kalmadan profesyonel düzeyde performans sunar.






BlueROV2 Teknik Özellikler ve Modüler Yapı
BlueROV2’nin itki sistemi, sensör seçenekleri, derinlik kapasitesi ve açık kaynaklı yapısı sayesinde, araştırma ve endüstriyel görevler için ölçeklenebilir su altı çözümü sunuyor.
Ürün Açıklaması
BlueROV2, benzeri görülmemiş bir esneklik ve genişletilebilirlik seviyesine sahip, yüksek performanslı ve son derece özelleştirilebilir bir sualtı ROV’dur. Altı ve sekiz itici konfigürasyonlarında sunulur, açık kaynaklı yazılımla donatılmıştır ve işlevselliğini artıran çeşitli aksesuarlara sahiptir. Binlerce adetinin kullanımda olduğu BlueROV2, hem basit hem de gelişmiş görevlere uyum sağlayabilen en popüler sualtı drone’larından biridir.
BlueROV2 kısmen monte edilmiş olarak gelir ve 6–8 saatlik bir montaj süreci gerektirir. Bu uygulamalı süreç, sistemi daha derinlemesine anlamanızı sağlar ve ihtiyaçlarınız değiştikçe ROV’unuzu kolayca yükseltmenizi veya değiştirmenizi mümkün kılar.
Düşük Işık Koşullarında Çalışan Kamera ve Son Derece Parlak Işıklar
ROV’un elektronik muhafazasının içinde, öne bakan bir yüksek çözünürlüklü (1080p, 30 fps) kamera bulunmaktadır. Bu geniş açılı, düşük ışık koşullarında çalışan kamera, bir eğim mekanizmasına monte edilmiştir; bu sayede pilot, ROV’dan bağımsız olarak kamerayı yukarı veya aşağı yönlendirebilir.
ROV, okyanus derinliklerini aydınlatmak için 6.000 lümene kadar ışık sağlayan iki veya dört adet kısılabilir Lumen Işık ile yapılandırılabilir.
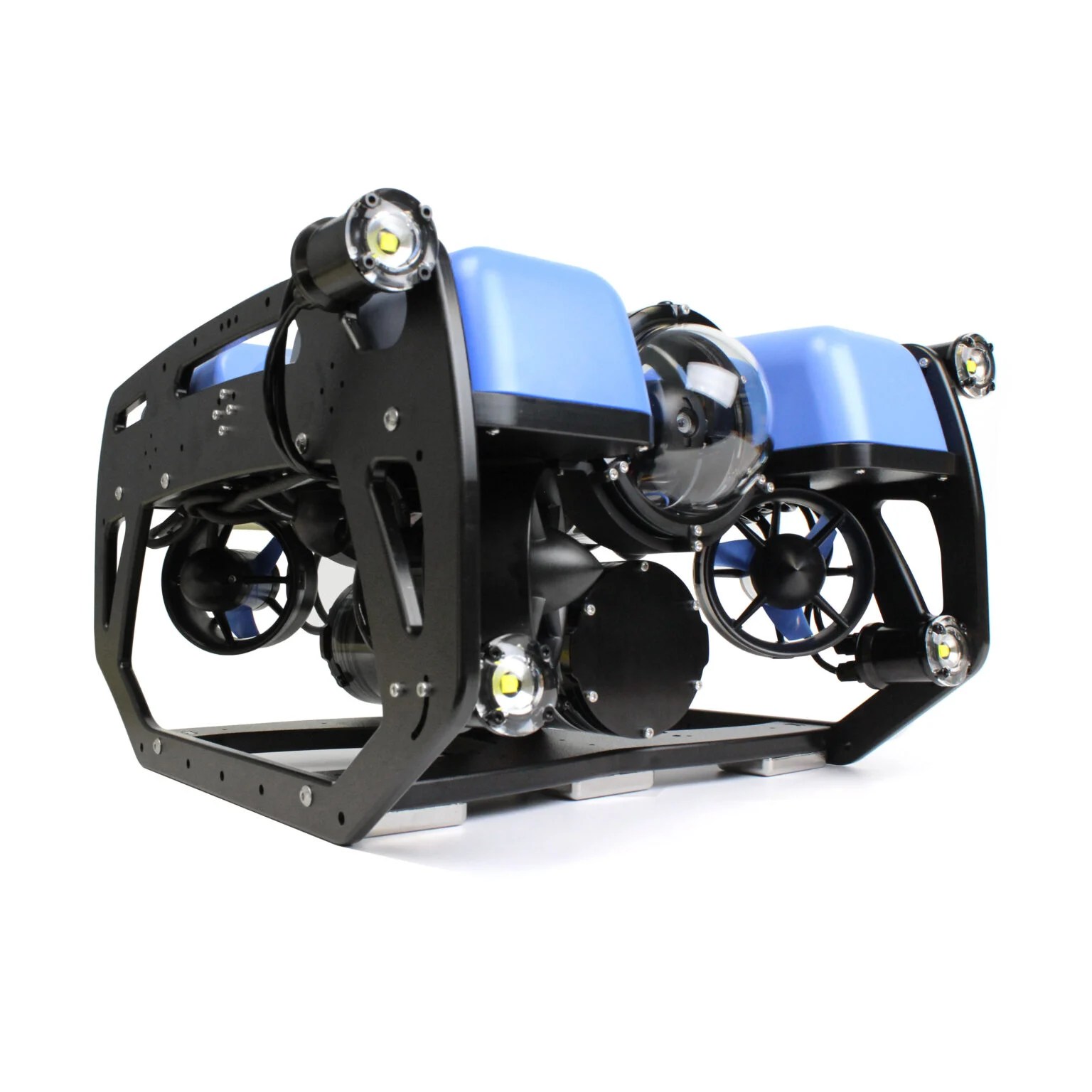
Vektörlü İtici Konfigürasyonu ve Ağır Donanım Kiti
ROV, patentli T200 İticiler‘i vektörlü bir konfigürasyonda kullanarak yüksek itme-ağırlık oranı ve her yöne hassas hareket etme kabiliyeti sunar. ROV altı iticiyle birlikte gelir ancak Ağır Konfigürasyon Yükseltme Kiti ile sekiz iticiye genişletilebilir; bu sayede tam altı serbestlik derecesi kontrolü ve gelişmiş stabilite sağlanır.
ROV’daki ayarlanabilir kazanç ayarları, elinizdeki göreve göre tepki süresini hassas bir şekilde ayarlamanıza olanak tanır; böylece çok düşük hızlarda hassas kontrolün yanı sıra akıntıları aşmak veya ağır yükleri taşımak için gereken gücü de elde edersiniz.
300 metreye kadar su geçirmezlik derecesi
BlueROV2, akrilik plastik veya eloksallı alüminyum muhafazalarla yapılandırılabilir. Akrilik muhafazalar 100 metre (330 ft) derinliğe kadar, alüminyum muhafazalar ise 300 metre (985 ft) derinliğe kadar su geçirmezlik derecesine sahiptir. ROV, Kilitli Su Geçirmez Muhafazalarımız ve WetLink Penetratörlerimiz gibi yüksek kaliteli bileşenlerden üretilmiştir ve Su Geçirmez Muhafazalarınızın gerçekten su geçirmez olduğundan emin olmak için bir vakum test pompası ile birlikte gelir.
İhtiyacınız Olan ROV’u Oluşturun
İş sınıfı veya araştırma sınıfı bir ROV gibi tasarlanan BlueROV2, ROV’un standart bileşenlerini taşıyan açık bir şasiye sahiptir. Bu sade tasarım, sağlam ve genişletilebilir olup, kıskaç veya tarama sonarı gibi ek aksesuarların takılmasını kolaylaştırır. Ayrıca, şasiyi daha da genişleterek ek pil muhafazaları gibi daha büyük yükler için daha fazla alan sağlayan bir yük kızak da sunuyoruz.
BlueROV2, modifiye edilip genişletilebilecek şekilde tasarlanmıştır. Hayal edebileceğiniz hemen hemen her türlü su altı görevine uyacak şekilde özelleştirilebilir! Müşterilerimizin BlueROV2 ile yaptıkları bazı şeyler:
- Arama ve Kurtarma
- Su Ürünleri Yetiştiriciliği
- Çevre Araştırmaları
- Denetimler
- Fotogrametri
- İstilacı Türlerin Yok Edilmesi
- Eğitim Faaliyetleri
- Eko-Turizm
- Geliştirme ve Test Platformu
- Bilgisayar Görme
- Küvet Oyuncağı (şaka, bunu yapmayın)

Navigator ve BlueOS ile çalışır
BlueROV2, Navigator Uçuş Kontrol Cihazı ve BlueOS tarafından kontrol edilir. Navigator, ROV’lar ve diğer robotik uygulamaları için tasarlanmış ve üretilmiştir. Yönelimini ölçmek için bir atalet ölçüm birimi (IMU), pusula yönünü ölçmek için bir manyetometre ve su girişini bildirmek için bir sızıntı sensörü dahil olmak üzere yerleşik sensörlere sahiptir. İtici motorlara, ışıklara, kıskaçlara ve diğer aksesuarlara bağlanabilen 16 çıkışın yanı sıra sensörler ve sonarlara bağlanmak için çok sayıda seri ve I2C bağlantı noktasına sahiptir. Genişletilebilirlik için bolca alana sahiptir!
Navigator, ROV içindeki tüm işleme ve hesaplama gereksinimlerini karşılayan bir Raspberry Pi 4 bilgisayarla birleştirilmiştir. Aracı çalıştırmak ve genişletmek için gerekli araçları ve özellikleri sağlayan açık kaynaklı BlueOS yazılımımızı çalıştırır. BlueOS, ArduSub araç kontrol yazılımını çalıştırır, kamera ve bağlantı kablosunu yönetir ve yeni özellikler eklemek için uzantıları yüklemeyi kolaylaştırır. BlueOS sürekli gelişmektedir ve yeni özellikler tüm BlueROV2’lere sunulmaya devam edecektir.
Yüzeyde, pilot ROV’u bir oyun kumandası ve açık kaynaklı yer kontrol istasyonumuz Cockpit’in çalıştığı bir dizüstü bilgisayar ile kontrol eder. Cockpit, araç kontrolü, canlı video ve sensör verileri için son derece özelleştirilebilir bir kullanıcı arayüzüdür.
Kitinizi Yapılandırma
BlueROV2, ilk kez kullananlardan deneyimli profesyonellere kadar hemen hemen herkes için tasarlanmıştır. Kitinizi, görevlerinize en uygun araç ve özelliklerle yapılandırabilirsiniz. İşte her bir seçeneğin ayrıntıları:
- Gövde Yapılandırması – 300 m derinlik derecesi için Alüminyum veya 100 m derinlik derecesi için Akrilik seçeneğini tercih edin.
- Ağır Yapılandırma Yükseltmesi – Ek stabilite ve yük taşıma kapasitesi için iki itici ve daha fazla kaldırma kuvveti ekler.
- Bağlantı Kablosu – 25 ila 300 metre uzunluklarında standart ve ince versiyonlarda mevcuttur. Seçeceğiniz uzunluk, ne kadar derine ve ne kadar uzağa gitmek istediğinize bağlıdır. 50 metreden uzun kablolar için, yönetimi kolaylaştırmak amacıyla Fathom Makarasını öneririz.
- Işıklar – 2 ışıklı veya 4 ışıklı konfigürasyonlarda mevcuttur. Kötü aydınlatma koşullarında veya gece çok fazla çalışma yapmayı planlıyorsanız, 4 ışıklı konfigürasyonu öneririz.
- Bağlantı Kablosu Makarası – Bağlantı kablosunun taşınmasını ve kullanılmasını kolaylaştırır. Standart makara boyutu, 150 metreye kadar standart bağlantı kablosu veya 200 metreye kadar ince bağlantı kablosu sığar. Daha uzun bağlantı kabloları için büyük boyutu tercih edin.
- Oyun Kumandası – Xbox Kablosuz Kumandasını çok beğeniyoruz, ancak diğer birçok kumanda da çalışacaktır.
- Sonarlar – Navigasyona ve su altı nesnelerinin konumlandırılmasına yardımcı olabilir. Daha fazla bilgi için Smooth Operator’ın Su Altı Sonarları ve Akustik Cihazlar Kılavuzu‘na göz atın.
Daha fazlası için BlueROV2 Aksesuarları ve Eklentileri‘ne göz atın!
Dalışa Başlamadan Önce
BlueROV2 kiti size aracı sağlasa da, kendi başınıza temin etmeniz gereken birkaç temel parça bulunmaktadır. Dizüstü bilgisayar, pil ve şarj cihazı gibi öğeler kite dahil değildir, ancak ROV’unuzu çalıştırmak için gereklidir. Doğru donanımı seçmenize yardımcı olacak önerilerimiz şunlardır:
- Dizüstü bilgisayar – Windows 11, Mac veya Linux işletim sistemlerine sahip orta veya üst düzey bir model öneririz. Aşağıdaki Teknik Ayrıntılar bölümünde sistem gereksinimlerini kontrol edin. iOS ve Android şu anda resmi olarak desteklenmemektedir.
- Pil – En iyi pil ömrü için 14,8 V, 18 Ah lityum iyon pilimizi öneririz, ancak bunu her yere gönderemiyoruz! Kullanılabilecek başka birçok uyumlu pil de bulunmaktadır. Uzun süreli kullanım için birkaç tane almanızı öneririz.
- Pil Şarj Cihazı – Önerdiğimiz bir şarj cihazı da mevcuttur, ancak pilinizle uyumlu herhangi bir lityum iyon pil şarj cihazı da işe yarayacaktır!
Ama durun, daha bitmedi!
BlueROV2 ile neler yapabileceğinizi daha derinlemesine keşfetmek istiyorsanız, aşağıdaki kaynakları öneririz:
- BlueOS – ROV’u kontrol eden yazılım olan BlueOS’un belgelerini ve geliştirici kılavuzunu inceleyin.
- ArduSub – ArduPilot belgelerinde araç kontrol donanım yazılımı hakkında bilgi edinin.
- Kılavuzlar – BlueROV2 ile ilgili tüm kılavuzlarımıza göz atın.
BlueROV2, elektronik aksamı test edilmiş ve kısmen monte edilmiş olarak gelir. Montaj, el aletleri kullanılarak yaklaşık 6–8 saatte tamamlanabilir. Aşağıda, BlueROV2 temel paketinin içerdiği alt montaj grupları ve diğer bileşenler listelenmiştir.
Çerçeve
- 1 x BlueROV2 Çerçevesi (montaj parçaları dahil)
- 9 x Balast Ağırlığı (200 g, 7 oz) ve montaj vidaları
Elektronik Muhafaza
- 1 x BlueROV2 Muhafaza (akrilik veya alüminyum)
Pil Muhafazası
- 1 x 3” Serisi Muhafaza Kelepçe Seti
- 1 x 3″ Serisi Tüp – 9,5″, 240 mm (akrilik veya alüminyum)
- 1 x 3″ Serisi Boş Alüminyum Uç Kapağı
- 1 x 3″ Serisi 4 Delikli Alüminyum Uç Kapağı
- 2 x 3″ Serisi O-Ring Flanş
- Gerekli donanım, O-ringler ve kilitleme kordonları
İtici Motorlar
- 3 x T200 İtici Motor, Saat Yönünde Pervane takılı
- 3 x T200 İtici Motor, Saat Yönünün Tersine Pervane takılı
- 16 x M3x16 iç altı başlı vida (316 paslanmaz çelik)
- 8 x M3x12 iç altı başlı vida (316 paslanmaz çelik)
Kaportalar
- 4 x BlueROV2 Kaportaları
- 4 x İşlenmiş Denizaltı Yüzdürme Köpüğü
- 16 x #4 boyutunda, 3/4” uzunluğunda yassı başlı kendinden diş açan vida (316 paslanmaz çelik)
Fathom-X Bağlantı Arayüzü
- 1 x Fathom-X Bağlantı Arayüzü (FXTI)
- 1 x 3 ft (1 m) USB-A – USB-B kablosu
Diğer Bileşenler
- 1 x Bar30 Derinlik/Basınç Sensörü
- 2 x Basınç Tahliye Valfi (PRV)
- 1 x BlueROV2 Pil Güç Kablosu Seti, 5,5 mm yuvarlak uçlu – XT90 adaptörlü
- 1 x Bağlantı Kablosu Yüksüğü, 5 adet ağır hizmet tipi kablo bağı ile
- 1 x Nem Göstergeli Silika Jel Kurutucu Torbalar
Aletler
- 1 x 2 muhafazayı test etmek için bağlantı parçalarıyla birlikte Elle Çalıştırılan Vakum Pompası
- 1 x M10 Bölme Anahtarı
- 1 x 2,5 mm altıgen tornavida
- 1 x Altıgen Anahtar Seti (1,5 mm, 2,0 mm, 2,5 mm, 3,0 mm)
- 1 x #2 Yıldız tornavida
- 2 x Silikon gres – 6 g yastık ambalaj
- 1 x O-Ring Çubuğu
- 1 x MicroSD – SD Adaptörü
- Kablo bağları
Ekstra Parçalar
- Ekstra boş penetratörler, penetratör somunları ve O-ringler
- Sızıntı sensörü prob uçları
- 1 x Sızıntı sensörü test cihazı
- Etiket
Kitte Bulunmayanlar
BlueROV2 kiti aracı sağlar, ancak kendi başınıza temin etmeniz gereken birkaç temel parça vardır. Dizüstü bilgisayar, pil ve şarj cihazı gibi öğeler kite dahil değildir, ancak ROV’unuzu çalıştırmak için gereklidir. Doğru donanımı seçmenize yardımcı olacak önerilerimiz şunlardır:
- Dizüstü bilgisayar – Windows 11, Mac veya Linux işletim sistemlerine sahip orta veya üst düzey bir model öneririz. Teknik Ayrıntılar bölümündeki sistem gereksinimlerini inceleyin. iOS ve Android şu anda resmi olarak desteklenmemektedir.
- Pil – En iyi pil ömrü için 14,8 V, 18 Ah lityum iyon pilimizi öneririz, ancak bunu her yere gönderemiyoruz! Kullanılabilecek başka birçok uyumlu pil de bulunmaktadır. Uzun süreli çalışma için birkaç tane almanızı öneririz.
- Pil Şarj Cihazı – Önerdiğimiz bir şarj cihazı da mevcuttur, ancak pilinizi destekleyen herhangi bir lityum iyon pil şarj cihazı da işe yarayacaktır!
Teknik Özellikler
Parametre Değer
Fiziksel
Uzunluk 457 mm 18 inç
Genişlik 338 mm 13,3 inç
Yükseklik 254 mm 10 inç
Havadaki Ağırlık (varsayılan balast ve Blue Robotics Lityum-iyon Pil dahil) 11–12 kg 24–27 lb
Havadaki Ağırlık (Balast veya pil hariç) 9–10 kg 20–22 lb
Kablo Geçiş Delikleri Toplam 18x M10, genişletme için 6x mevcut
Suyla Temas Eden Malzemeler Eloksallı alüminyum 6061-T6, 7075-T6
Paslanmaz çelik 316, 18-8
HDPE
Polikarbonat
%30 cam elyaf takviyeli polikarbonat
Naylon
Akrilik
PTFE
Plastik
FKM
Buna-N
Kauçuk
R-3318 poliüretan köpük
Poliüretan köpük
Poliüretan
Epoksi
Molykote 111 bileşiği
Elektronik Muhafazası Blue Robotics 4″ serisi WTE
Pil Muhafazası Blue Robotics 3″ serisi WTE
Yüzdürme Köpüğü R-3318 poliüretan köpük
Balast Ağırlığı 9 x 200 g paslanmaz çelik ağırlık
Performans
Maksimum Nominal Derinlik 100 m (akrilik tüplerle)
300 m (alüminyum tüplerle) 330 ft (akrilik tüplerle)
985 ft (alüminyum tüplerle)
Sıcaklık Aralığı 0–30°C 32–86°F
Yük Kapasitesi¹ (yapılandırmaya bağlı) 1,2 kg (4x Lümen) ila 1,4 kg (lümen yok) 2,6 ila 3,1 lbs
Maksimum İleri Hız 1,5 m/s 3 knot
İleri Bollard İtme Gücü (45°) 9 kgf 19,8 lbf
Dikey Bollard İtme Gücü 7 kgf 15,4 lbf
Yanal Bollard İtme Gücü (45°) 9 kgf 19,8 lbf
İtici Motorlar Blue Robotics T200
ESC Blue Robotics Basic 30A ESC
Pervane Yapılandırması 6 pervane
(4 vektörlü, 2 dikey)
Pil
Pil Ömrü (Blue Robotics 15,6 Ah pil ile) ~2 saat (normal kullanım)
~4 saat (hafif kullanım)
Piller yaklaşık 30 saniye içinde değiştirilebilir
Pil Konektörü XT90
Işıklar
Parlaklık Her biri 1500 lümen, karartma kontrolü ile
Işık Hüzmü Açısı 135 derece, ayarlanabilir eğim ile
Bağlantı Kablosu
Çap Standart: 7,6 mm
İnce: 4,0 mm 0,30 inç
0,16 inç
Uzunluk Standart: 25–300 m
İnce: 50–200 m 80–980 ft
164–656 ft
Çekme Mukavemeti 35 kgf 77 lbf
Kopma Mukavemeti 155 kgf 342 lbf
Mukavemet Elemanı Su geçirmez Kevlar
Tatlı Suda Yüzdürme Nötr
Tuzlu Suda Yüzdürme Hafif pozitif
İletkenler 4 veya 1 bükümlü çift, 26 AWG
Sensörler
IMU 6-DOF IMU (Navigator’da)
Pusula Çift 3-DOF manyetometre (Navigator’da)
İç basınç Dahili barometre (Navigator’da)
Basınç/Derinlik ve Sıcaklık Sensörü (harici) Blue Robotics Bar30
Akım ve Gerilim Algılama Blue Robotics Power Sense Modülü
Sızıntı Sensörü Entegre sızıntı sensörü (Navigator üzerinde)
Kamera Eğimi
Eğim Aralığı +/- 90 derece kamera eğimi (toplam 180 derece aralık)
Eğim Servosu Hitec HS-5055MG
Kamera
Kamera Modeli Düşük Işık HD USB Kamera
Çözünürlük 1080p
Görüş Açısı (Sualtı) 110 derece (yatay)
Işık Hassasiyeti 0,01 lüks
Kontrol Sistemi
Yerleşik Bilgisayar Raspberry Pi 4 (2 GB) w/ BlueOS
Otopilot Blue Robotics Navigator
Otopilot Yazılımı ArduSub
Bağlantı Arayüz Kartı Fathom-X Bağlantı Arayüz Kartı
¹ Bazı yük konfigürasyonları ek kaldırma kuvveti gerektirecektir.
Sistem Gereksinimleri
Parametre Değeri
İşletim Sistemi
Windows Windows 10 64 bit veya üstü
MacOS 10.20 veya üstü
Ubuntu En son LTS (20.04) veya üstü
Önerilen Donanım ¹
İşlemci i5 işlemci eşdeğeri veya üstü
Grafik İşlemcisi ² Ayrı Nvidia veya AMD grafik kartı
RAM 8 GB veya daha fazla
Depolama Katı hal sürücüsü (SSD)
¹ Yer kontrol istasyonu yazılımının performansı, sistem ortamına, üçüncü taraf uygulamalara ve kullanılabilir sistem kaynaklarına bağlı olacaktır. Daha yüksek kapasiteli donanım, daha iyi bir deneyim sağlayacaktır.
² Entegre grafik kartları çoğu durumda uygundur, ancak en iyi deneyim için ayrı bir grafik kartı önerilir.
Bileşen Derinlik Derecelendirmeleri
Bileşen Derinlik Derecelendirmesi
Elektronik Muhafaza Tüpü (4″ Serisi) 100 m (akrilik)
1000 m (alüminyum)
4“ Serisi 18 Delikli Uç Kapağı 1000 m
4” Serisi Kubbe 500 m
Pil Muhafaza Tüpü (3“ Serisi) 150 m (akrilik)
1000 m (alüminyum)
3” Serisi Boş Alüminyum Uç Kapağı 1000 m
3″ Serisi 4 Delikli Uç Kapağı 1000 m
Bar30 Derinlik/Basınç Sensörü 300 m
Basınç Tahliye Valfi (PRV) 1000 m
WetLink Penetratörler ve Boşluklar 1000 m
Yüzdürme Köpüğü 300 m
Fathom ROV Hazır Bağlantı Kablosu 1000 m
Lumen Işıklar 500 m
T200 İticiler 300 m
2D Çizimler

3D Modeller
BLUEROV2-R4 (.zip)
BLUEROV2-R3 (.zip)
BLUEROV2-R1 (.zip)
Belgeler
BlueROV2 (R4, güncel) kablo şeması (.pdf)
Kırmızı kablosuz ESC’li BlueROV2 (R1, R2 ve R3) kablo şeması (.pdf)
BlueROV2 Heavy (R1, R2 ve R3) kablo şeması (.pdf)
Kırmızı kablolu (BEC) ESC’lere sahip BlueROV2 (2018 öncesi) kablo şeması (.pdf)
Revizyon Geçmişi
20 Ekim 2025
- BR-100196, BlueROV2 Temel Paket – Alüminyum
- Kubbe malzemesi sertleştirilmiş polikarbonata değiştirildi
- Tespit halkası malzemesi %30 cam elyaf takviyeli polikarbonata değiştirildi
29 Eylül 2025
- BR-100415, BlueROV2 Temel Paketi – Akrilik
- Kubbe malzemesi sertleştirilmiş polikarbonata değiştirildi
- Tespit halkası malzemesi %30 cam elyaf takviyeli polikarbonata değiştirildi
24 Nisan 2025
- BR-100415, BlueROV2 Temel Paketi – Akrilik
- WTE 3“ Serisi Flanş, RAILS uyumluluğu ile güncellendi
24 Mart 2025
- BR-100196, BlueROV2 Temel Paketi – Alüminyum
- WTE 3” Serisi Flanş, RAILS uyumluluğu ile güncellendi
6 Mart 2025
- BR-100196, BlueROV2 Temel Paketi – Alüminyum
- T200 İticiler, O-ring stator tabanına güncellendi
4 Mart 2024
- BR-100415, BlueROV2 Temel Paketi – Akrilik
- T200 İticiler, O-ring stator tabanına güncellendi
12 Şubat 2025
- BR-100196, BlueROV2 Temel Paketi – Alüminyum
- WTE 4″ Serisi Flanş, RAILS uyumluluğu ile güncellendi
12 Kasım 2024
- BR-100415, BlueROV2 Temel Paketi – Akrilik
- SD kart, BlueOS 1.3.1’e güncellendi
1 Kasım 2024
- BR-100196, BlueROV2 Temel Paketi – Alüminyum
- SD kart, BlueOS 1.3.1’e güncellendi
24 Haziran 2024
- BR-100196, BlueROV2 Temel Paketi – Alüminyum
- Kamera montaj vidasının boyutu artırıldı
31 Mayıs 2024
- BR-100415, BlueROV2 Temel Paketi – Akrilik
- Kamera montaj vidasının boyutu artırıldı
23 Mayıs 2024
- BR-100196, BlueROV2 Temel Paketi – Alüminyum
- Raspberry Pi SD kartı 16 GB’dan 128 GB’a yükseltildi
- Kamera bileşenleri için daha fazla boşluk sağlamak üzere kamera montajı revize edildi
20 Mayıs 2024
- BR-100415, BlueROV2 Temel Paketi – Akrilik
- Raspberry Pi SD kartı 16 GB’den 128 GB’a yükseltildi
- Kamera bileşenleri için daha fazla boşluk sağlamak üzere kamera montaj aparatı revize edildi
16 Mayıs 2024
- BR-100196, BlueROV2 Temel Paketi – Alüminyum
- Kamera montaj vidasının boyutu artırıldı
7 Şubat 2024
- SOS prob uçları kare şekle değiştirildi
29 Haziran 2023
- BLUEROV2-P-R4-RP SKU’su BR-100415 olarak değiştirildi
- BLUEROV2-M-R4-RP SKU’su BR-100196 olarak değiştirildi
7 Haziran 2022
- R4 – İlk sürüm
- Raspberry Pi 3B ve Pixhawk, Raspberry Pi 4B ve Navigator Uçuş Kontrol Cihazı olarak değiştirildi
- 4” Serisi Muhafaza, 4” Serisi Kilitli Muhafaza olarak değiştirildi
- 3” Serisi Muhafaza, 3” Serisi Kilitli Muhafaza olarak değiştirildi
- Vakum Havalandırma ve Tapa, Basınç Tahliye Valfi (PRV) olarak değiştirildi
- Bar30, R2 sürümüne güncellendi
- ROV Çerçevesi, R3 sürümüne güncellendi (mukavemeti artırmak için küçük değişiklikler)
- Vakum tapası yeni sürüme güncellendi
- Yuva uzatma klipsleri, birleştirilmiş montaj klipslerine değiştirildi
14 Eylül 2021
- R3 – İlk sürüm
- 14 delikli uç kapağı 18 delikli Uç Kapağı olarak güncellendi
- Yüzdürme köpüğü (1,9 x 3,4 x 4,9 inçlik bloklar) İşlenmiş Yüzdürme Köpüğü olarak güncellendi
- 9 adet Balast Ağırlığı dahil (7 adet Balast Ağırlığından)
- Pil Güç kablosu R2 tasarımına güncellendi
- Güç Algılama Modülü R3 tasarımına güncellendi
- XT90 – mermi adaptörü 5,5 mm mermilerle güncellendi
- Penetrator Boşlukları WetLink Penetrator Boşlukları olarak güncellendi
24 Mayıs 2021
- R2 – İlk sürüm
- T200 İticiler R2 tasarımına güncellendi
4 Kasım 2020
- Vakum Pompası, Mityvac Vakum Pompası olarak güncellendi
4 Ocak 2019
- 200 g Balast Ağırlığı, R2 tasarımına güncellendi
- Nem Göstergeli Silika Jel Kurutucu Torbalar, R2 tasarımına güncellendi
10 Ekim 2018
- Güç Algılama Modülü, R2 tasarımına güncellendi
- Güç Kaynağı, 5V 6A tasarımına güncellendi
28 Ağustos 2018
- Kamera eğim tertibatı R2 tasarımına güncellendi
7 Ağustos 2018
- Ana kite 1 adet Fathom-X Bağlantı Arayüzü (FXTI) eklendi
- Mevcut bağlantı kablosu Fathom Bağlantı Kablosu R2 tasarımına güncellendi
- mRo Güç Modülü Blue Robotics Güç Algılama Modülüne (PSM) güncellendi
10 Temmuz 2018
- Mevcut ışıklar Lumen Subsea Light R2 olarak güncellendi
24 Nisan 2018
- 4″ Kubbe, R4 tasarımına güncellendi
14 Şubat 2018
- 3 torba Nem Göstergeli Silika Jel Kurutucu eklendi
- 2 adet Kablo Geçidi Boşluğu, 2 adet 013 O-ring, 2 adet Kablo Geçidi Somunu eklendi
15 Ocak 2018
- 2 muhafazayı test etmek için bağlantı parçalarıyla birlikte Elle Çalıştırılan Vakum Pompası eklendi.
9 Kasım 2017
- ESC’ler R3 tasarımına güncellendi
21 Eylül 2017
- Güncellenen Çerçeve – 30 Derecelik itici montaj seçeneği, yuvarlatılmış kenarlar, sabit vidalı ekler
31 Ağustos 2017
- Kamera Düşük Işık HD USB Kamera olarak güncellendi
2 Mayıs 2017
- ESC, R2 tasarımına güncellendi
14 Mart 2017
- Pixhawk’a ArduSub 3.4 (kararlı sürüm) önceden yüklendi
- Pixhawk’a önerilen parametreler önceden yüklendi
- Raspberry Pi 3 için SD karta ArduSub Raspbian önceden yüklendi
- Elektronik tepsisine Fathom-X Tether Arayüzü önceden kuruldu ve tüm kablolama tamamlandı
- Elektronik tepsisine Raspberry Pi ve Pixhawk önceden kuruldu ve kablolamanın çoğu tamamlandı
- Pixhawk Güç Modülü önceden kuruldu ve kablolama tamamlandı
- ESC’ler önceden kablolandı
- Üç itici artık saat yönünün tersine dönen pervanelerle önceden kurulmuş olarak geliyor
- Kamera, Pixhawk, Raspberry Pi ve Fathom-X bağlantıları test edildi
- SOS Sızıntı Sensörü elektronik tepsisine eklendi ve kuruldu
27 Ekim 2016
- 4″ Dome, R2 tasarımına güncellendi
31 Ağustos 2016
- Penetrator Anahtarı, dahil edilen aletlere eklendi
21 Haziran 2016
- R1 – İlk sürüm

{kind=link}